آشنایی با دستگاه حفار زوکور قطعه R4-Q4 خط 4 متروی تهران و برخی تغییرات صورت گرفته بر روی آن 1- مقدمه از مهمترین عوامل موثر در روند اجرای پروژههای احداث تونل، انتخاب روش مناسب حفاری است. حفاری تونلها به روشهای سنتی و مکانیزه انجام میپذیرد و هریک از این روشها، با توجه به شرایط زمینشناسی، ژئوتکنیک، آب زیرزمینی و بسیاری عوامل دیگر تقسیمبندیهای گوناگونی دارند. یکی از روشهای حفاری تونل به روش مکانیزه سپری، استفاده از دستگاههای حفاری سپر باز میباشد. دستگاه حفار زوکور از جمله دستگاههای حفاری سپر باز و از نوع سپرهای حفر بخشی میباشد و بهترین کارایی آن، حفاری در محیطهای خاکی همگن نسبتاً پایدار و بالای سطح ایستابی میباشد. با تعویض قسمت حفار به راحتی میتوان از این تکنولوژی برای حفاری در خاک و محیطهای سنگی استفاده نمود. از دیگر مزایای استفاده از این دستگاهها این است که اپراتور فقط چند متر با سینهکار تونل فاصله دارد و از این طریق کنترل دقیق حفاری و عکس العمل سریع در صورت تغییر شرایط زمین امکانپذیر میگردد. دستگاه زوکور یکی از اولین دستگاههای مکانیزه است که برای اولین بار در ایران مورد استفاده قرار گرفته است. در سال 1356 شرکت فرانسوی سوفرتو به منظور احداث تونلهای خطوط چهارگـانه متـروی تهران نسبت به انجام مناقصه بینالمللی برای طراحی و ساخت دستگاه حفار مناسب خاک تهران اقدام نمود و قرارداد سـاخت سه دستگـاه حفار و واگنهای حمل خاک و متعلقـات مربوطـه با شرکت آمریکایی زوکور منعقد گردید. پس از پیروزی انقلاب اسلامی در سال 1358دو دستگاه حفاری به تهران حمل و انبار گردید و سومین دستگاه حفار در سال 1364 به ایران حمل و انبار گردید و در سالهای بعد، این دستگاهها بهمنظور حفر بخشی از تونلهای خطوط یک، دو و چهار متروی تهران مورد استفاده قرار گرفتند. بهمنظور آشنایی با این دستگاهها، مشخصات فنی و نحوه عملکرد دستگاه زوکور مورد استفاده در خط 4 متروی تهران در این گزارش ارائه میگردد. 
شکل 1- نمایی از دستگاه حفار زوکور 2- مشخصات دستگاه حفار زوکور استفاده شده در قطعه R4-Q4 خط 4 متروی تهران قسمتهای تشکیل دهنده دستگاه زوکور شامل موارد ذیل میباشد: - سیستم حفار - سپر محافظ (شیلد) - سیستم راهبری - پاور پک (مرکز توزیع نیرو) - پوش جکها - جک های محافظ سینه کار - صفحات محافظ سقف - جکهای تصحیح حرکت شیلد - نصب کننده قطعات پیش ساخته بتنی (ارکتور) - حمل کننده قطعات بتنی (وینچ) - نوار نقالهها 2-1- سیستم حفار این سیستم جهت حفاری خاک و نیز هدایت خاکهای حفاری شده به روی نوار نقاله جهت حمل به قسمت عقب دستگاه مورد استفاده قرار میگیرد. سیستم حفاری بر حسب نوع خاک و سنگ طراحی میگردد و دارای انواع مختلفی می باشد. سیستم اصلی که برای خاک تهران طراحی و بر روی دستگاههای زوکور نصب شده بود، بصورت بیل حفاری بود که با کندن خاک، آن را به سمت نوار نقاله هدایت میکرد.
شکل 2- سیستم حفاری با بیل در دستگاه حفاری زوکور بکار رفته در عملیات حفاری خطوط (1) و (2) متروی تهران در حین عملیات حفاری قسمتی از خطوط (1) و (2) مترو به علت خرابی مکرر بیل حفار در حین حفاری تونل و بالا بودن زمان تعمیر آن که منجر به توقف کلیه فعالیتهای تونلسازی میشد و کاهش راندمان حفاری را به همراه داشت، پس از دمونتاژ دستگاه حفار، برای استفاده مجدد از یکی از این دستگاهها در عملیات حفاری قطعه R4-Q4 خط 4 متروی تهران، سیستم حفاری بصورت رودهدر مخروطی با بازوی تلسکوپی طراحی گردید و جهت تخلیه و هدایت خاک به سمت نوار نقاله از بیل مکانیکی استفاده شد. این عامل زمان تعمیر سیستم حفاری را کاهش داد و راندمان حفاری را به حدود 15 مترمکعب در ساعت رساند. شکل 3- سیستم حفاری با رودهدر مخروطی در دستگاه حفاری زوکور بکار رفته در عملیات حفاری خط (4) متروی تهران 
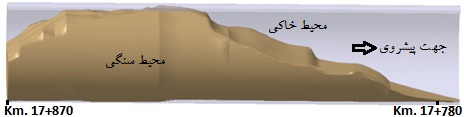
شکل 4- بیل مکانیکی جهت انتقال خاک حفاری شده توسط رودهدر مخروطی به نوار نقاله بکار رفته در عملیات حفاری خط (4) متروی تهران از ابتدای شهریور ماه 1386 پس از احداث 528 متر از تونل قطعه R4-Q4 (نصب 347 رینگ)، از رینگ شماره 609 در کیلومتراژ 904+17 دستگاه حفار به قطعات سنگی بزرگ برخورد نمود که این عامل باعث کندی عملیات حفاری گردید، ولی حفاری بوسیله رودهدر مخروطی ادامه پیدا کرد. با توجه به اینکه قبلاً در هنگام عبور از زیر کانال سرخه حصار در کیلومتراژ 272+18 نیز دستگاه حفاری با وضعیت مشابهی برخورد نموده بود، امید میرفت که این وضعیت زمینساختی نیز با توجه به نزدیکی به کانال ابوذر از همان جنس بوده و به زودی مرتفع گردد. هنگام پیشروی جهت نصب رینگ 629 در کیلومتراژ 871 + 17 این حالت تبدیل به یک توده عظیم سنگی یکپارچه به ارتفاع 5/4 متر از کف تونل گردید که تقریباً نیمی از سطح مقطع تونل را در بر گرفته بود. با توجه به اینکه عملاً امکان تخریب سنگ با رودهدر مخروطی وجود نداشت، تعویض سیستم حفاری تونل در دست بررسی قرار گرفت و در نهایت پس از بررسیهای کارشناسی متعدد تعویض سیستم حفاری از حالت سیستم حفاری مخروطی (رودهدری) به سیستم حفاری طبلکی (درام کاتر) و چکش هیدرولیکی بصورت ترکیبی با استفاده از یک بازوی دومنظوره قابل نصب بر روی دستگاه حفار زوکور اجرایی شد.  شکل 5- تصویر ماهواره ای از محل برخورد مقطع سنگی به تونل قطعهR4-Q4 شکل 6- پروفیل طولی محل برخورد سنگ با تونل قطعهR4-Q4 
شکل 7- چکش هیدرولیکی نصب شده بر روی بازوی دو منظوره طراحی و ساخته شده جهت حفاری در سنگ و ادامه مسیر شکل 8- درام کاتر نصب شده بر روی بازوی دستگاه حفار زوکور جهت حفاری در سنگ و ادامه مسیر ک چکش هیدرولیکی نصب شده بر روی بازوی دستگاه حفار زوکور جهت حفاری در سنگ و ادامه مسیر2-2- سپر محافظ (شیلد) مهمترین نقطه قوت در استفاده از دستگاههای حفار مکانیزه بکارگیری سپر محافظ (شیلد) بعنوان سیستم نگهداری در حین عملیات حفاری میباشد. وجود شیلد هم در حفظ سلامت پرسنل و هم در محافظت از بسیاری از تجهیزات مهم دستگاه حفاری، حیاتی است و امکان حفر تونلی با مقطع یکنواخت را فراهم میآورد. شیلد دستگاه حفار زوکور استوانه ای است به قطر 9 و طول 12 متر (با احتساب شاسی تراول) که با متعلقات دارای وزن تقریبی 250 تن میباشد. شیلد از 5 قطعه مجزا تشکیل گردیده که هنگام دمونتاژ میتوان این قطعات را جدا نموده و هر یک را به تنهایی حمل نمود.
شکل 9- نمایی از شیلد دستگاه حفار زوکور با تفکیک 5 قطعه آن شکل 10- شیلد دستگاه حفار پس از اتمام حفاری قطعه R4-Q4 خط 4 متروی تهران 2-3- سیستم راهبری در داخل شیلد، سیستم راهبری دستگاه حفار قرار دارد که وظیفه کنترل، راهبری و هدایت ماشین حفار و فعالیتهای ذیل را عهده دار است: 1- کنترل سیستم حفاری و راهبری دستگاه 2- کنترل نصب قطعات پیش ساخته بتنی (سگمنت) 3- مجموعهای از صفحات محافظ Pooling Plate و صفحات سینه Breast Plate که وظیفه جلوگیری از ریزشهای احتمالی خاک را به داخل شیلد بر عهده دارند. شکل11- سیستم راهبری دستگاه حفار زوکور موجود در کارگاه حفاری قطعه R4-Q4 خط 4 متروی تهران 2-4- پاور پک (مرکز توزیع نیرو) پاور پک شامل الکترو پمپ های هیدرولیکی، فیلترها، شیرفلکهها و خطوط لولههای ارتباطی می باشد که در قسمت جلوی شاسی و در دو طرف دستگاه حفار قرار گرفته است. این مرکز نیروی مورد نیاز قسمتهای مختلف دستگاه حفار را بوسیله الکتروپمپهای هیدرولیکی تامین مینماید. مخزن روغن هیدرولیک در میان شاسی و بالای شاسی تسمه نقاله قرار دارد. بر روی مخزن هیدرولیک دو دستگاه هواکش جهت هواگیری و نیز تامین هوای سطح روغن نصب شده اند. در داخل مخزن روغن، فیلتر روغن نصب شده است تا روغن تمیز به سیستم برساند و در بالای مخزن روغن در مسیر برگشتی روغن به مخزن فیلتر نصب شده است. عمده تجهیزات موجود در این قسمت شامل الکتروموتورها و پمپ های پاور پک و سیستم خنک کننده روغن هیدرولیک میباشند. 
شکل 12- محل قرارگیری پاور پک دستگاه حفار زوکور بر روی گنتری ها (کارگاه حفاری قطعه R4-Q4 خط 4 متروی تهران) 2-5- پوش جکها پوش جکها عامل اصلی پیشروی و حرکت رو به جلوی دستگاه حفار می باشند. جکها با تکیه بر پوشش نگهداری سگمنتی پشت صفحه شیلد به سمت جلو حرکت میکنند. در پشت صفحه شیلد تعداد 30 عدد جک طراحی شده است و از نظر هیدرولیکی دارای مشخصات یکسانی هستند. اما 10 جک بالای صفحه شیلد از نظر کفشک های فشاری بر قطعات بتنی با بقیه تفاوت دارند. شکل 13- حرکت شیلد به سمت جلو با استفاده از فشار جکها به سگمنتهای نصب شده 2-6- جک های محافظ سینه کار جک های محافظ سینهکار جهت جلوگیری از ریزش آب و مواد به صفحه پشت شیلد نصب شدهاند. ترتیب قرار گرفتن صفحات محافظ سینهکار توسط سه دستگاه جک هدایت می شود که یک جک وظیفه انتقال طولی و دو جک دیگر حرکت دورانی جهت باز شدن صفحه را به جلو به عهده دارند. در مجموع تعداد هفت صفحه جهت محافظت از سینه کار جلوی شیلد طراحی و نصب شده است. 2-7- صفحات محافظ سقف صفحات محافظ سقف جهت جلوگیری از ریزش مواد و خاک لغزنده و رونده از قسمت بالا و جلوی شیلد به درون شیلد طراحی و نصب شده اند. برای این منظور تعداد یازده صفحه محافظ تعبیه شده که هر یک از آنها توسط یک جک هیدرولیکی کار میکند. جکهای مزبور دارای حرکت طولی بوده و صفحات را به جلو هدایت میکنند. 2-8- جکهای تصحیح حرکت شیلد دو عدد جک جهت کنترل حرکت شیلد در عرض، در بدنه شیلد تعبیه شدهاند. 2-9- نصب کننده قطعات پیش ساخته بتنی (ارکتور) این بخش از دو رینگ متحدالمرکز تشکیل شده است که جهت نصب قطعات پیش ساخته بتنی در محدوده محیطی بکار میرود. نحوه عملکرد آن بدینصورت است که در قطعات سگمنتی سوراخهایی در حین ساخت تعبیه شده که دستکهای ارکتور داخل آن سوراخها شده و بوسیله آنها قطعات بتنی را بلند کرده و در راستای محیطی آن را چرخانده و در جای مناسب قرار می دهد. 
شکل 14- ارکتور در حال بلند کردن قطعه پیش ساخته بتنی
2-10- حمل کننده قطعات بتنی (وینچ) این بخش، قطعات سگمنت را از قسمت عقب دستگاه حفار به جلو حمل کرده و آنها را در زیر صفحه ارکتور جهت نصب قرار میدهد. 
شکل15- وینچ در حال انتقال سگمنت به زیر صفحه ارکتور 2-11- نوار نقالهها نوار نقالهها مسئولیت انتقال خاکهای حفاری شده به پشت دستگاه را بر عهده دارند. چند دستگاه نوار نقاله ساده بصورت ترکیبی میتوانند این مهم را انجام دهند. هر یک از این دستگاهها بوسیله یک الکتروموتور و یک دستگاه گیربکس ساده به حرکت در میآیند. تکیهگاه لاستیک نوار نقاله بر روی غلطکهای کوچک و بزرگ قرار گرفته است که این غلطکها بصورت دستی روغنکاری میشوند. 
شکل 16- سیستم باربری با استفاده از نوار نقاله
مراجع: گزارش دستگاه حفار زوکور شرکت متروی تهران، مهندسین مشاور گنو
|